Technologieinnovationen
STEREO VISION-PIONIERE SEIT 1997
Seit 1997 entwickeln und fertigen wir branchenführende 2D- und 3D-Stereovisionsensoren. Seit unserer Einführung des weltweit ersten Stereosensors für den Massenmarkt gab es unzählige Innovationen. Verbesserungen der Genauigkeit, Bildauflösung, Kalibrierung, Größe und Zuverlässigkeit sind das Ergebnis ständiger Hardware- und Software-Entwicklungen. Unsere umfangreiche Erfahrung und unser Engagement für Qualität ermöglichen es uns, branchenführende Technologien in Produkte zu integrieren, die einen herkömmlichen Lebenszyklus überschreiten – einige Personenerfassungs- und -zählsensoren sind noch heute in Betrieb!

Die Entwicklung unserer Stereo Vision-Technologie von 1997 (links) bis 2017 (rechts)
JETZT ETWAS ZUR TECHNIK
Durch die Entwicklung innovativer Hardware und Software-Pakete, die eine umfassende Stereo-Unterstützung umfassen, hat FLIR 3D-Stereovision zu der genauesten und konsistentesten Kundenfrequenz-Erfassungstechnologie gemacht – von Bildkorrektur und -ausrichtung bis hin zu Stereozuordnung mit dichter Korrelation.
WIE FUNKTIONIERT ES?
3D-Stereovision funktioniert ähnlich wie die 3D-Wahrnehmung mit dem menschlichen Auge. Es beginnt mit der Bestimmung von Bildpixeln, die demselben Punkt in einem Bereich entsprechen, der von mehreren Kameras beobachtet wird. Die 3D-Position eines Punktes kann dann durch Triangulation mithilfe eines Strahls von jeder Kamera bestimmt werden. Je mehr übereinstimmende Pixel ermittelt werden, desto mehr 3D-Punkte können mit einem Satz an Bildern bestimmt werden. Bei den Korrelations-Stereo-Methoden wird nach Übereinstimmungen in jedem Pixel des Stereobildes gesucht, wodurch zehntausende 3D-Werte entstehen, die mit jedem Stereobild generiert werden.

Jeder 3D-Sensor ist mit 2 Kameras ausgestattet.
Dadurch kann der Sensor die 3D-Tiefe berechnen.
3D-STEREO-BILDGEBUNGS-PIPELINE
WIE WIR PRÄZISE BLEIBEN: KALIBRIERUNG UND BERICHTIGUNG
Jeder einzelne FLIR Brickstream Sensor wird werkseitig gegen Objektivverzerrung und Sensor-Fehlausrichtungen kalibriert, um eine konsistente Kalibrierung über sämtliche Sensoren hinweg zu garantieren. Während des Berichtigungsprozesses werden epipolare Linien innerhalb eines RMS-Fehlerbereichs von 0,05* Pixeln ausgerichtet. Die Kalibrierung und Berichtigung ist der Schlüssel zu hochwertigen Disparitätsbildern eines 3D-Sensors und ermöglicht die konsistente und genaue Erfassung der Kundenfrequenzdaten zwischen Sensoren. Der Sensor ist aufgrund seiner besonderen Bauform außerdem gegen mechanische Stöße und Vibrationen geschützt. Im Folgenden sehen Sie den Workflow eines FLIR Brickstream 3D-Sensors für die Berechnung von 3D-Stereo-Höhenbildern.

1) ROHBILD
Rohbilder werden von der linken und rechten Kamera des Sensors aufgenommen. Eine geringfügige Objektivverzerrung erzeugt eine tonnenförmige Verzeichnung der Bilder.

2) BERICHTIGTES BILD
Das Bildpaar wird korrigiert, um die Objektivverzerrung zu beseitigen, und die Bilder werden horizontal miteinander ausgerichtet. Die Bilder besitzen jetzt gerade Perspektivenlinien.

3) KANTENBILD
Anschließend wird die Kantenschärfung angewandt, um Kantenbilder zu erstellen, die nicht durch die Helligkeit des Bildes beeinflusst sind.
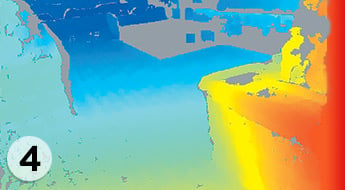
4) 3D-TIEFENBILD
Für jeden Pixel im rechten Bild wird ein entsprechender Pixel im linken Bild durch Korrelation bezogen. (Eingefärbt, um Tiefe anzuzeigen)