Bildverarbeitungsgeführter Roboter nutzt zum Beschneiden von Tomatenpflanzen Chameleon3
Blätter von Tomatenpflanzen zu entfernen, ist ein relativ einfaches Verfahren, bei dem herkömmlicherweise die älteren Blätter von Hand vom unteren Teil der Stiele geschnitten werden. Dieser Arbeitsschritt wird bei gewerblich angebauten Tomatenkulturen wöchentlich ausgeführt, um die Reifung der Früchte voranzutreiben. Die Unberechenbarkeit und die hohen Kosten der mit diesem Verfahren verbundenen Handarbeit und die Schwierigkeit, eine motivierte Arbeitskraft für diese monotone Aufgabe zu finden, gaben jedoch kürzlich für eine Tomatenanbau-Unternehmensgruppe in den Niederlanden den Anstoß, mit den Automatisierungsexperten von Priva zusammenzuarbeiten, um nach einer alternativen Lösung zu suchen. Aus Ihren Überlegungen ging schließlich die Entwicklung und Optimierung eines Roboters hervor, der Tomatenzüchtern eine wirtschaftlich tragbare Alternative zum Entblättern der in den Gewächshäusern angebauten Tomatenkulturen von Hand bietet.
Laut Dr. Tomas de Boer, dem Entwicklungsingenieur im Bereich Mechatronik, der innerhalb des Entwicklungsteams von Priva für das Design des Systems verantwortlich war, fährt der Deleaf-Line-Roboter "Kompano“ auf bestehenden Rohrschienen die Wege im Gewächshaus, das zu beiden Seiten der Schienen in bestimmten Abständen mit Tomatenpflanzen bestückt ist, entlang (Abbildung 1). Der Roboter, der mit einem Bildverarbeitungssystem und einem teleskopischen Schneidwerkzeug ausgestattet ist, fährt systematisch von Pflanze zu Pflanze, erkennt die Blätter und entfernt sie.

Abbildung 1: Der Deleaf-Line-Roboter Kompano fährt auf Rohrschienen durch das Gewächshaus, das zu beiden Seiten der Schienen in bestimmten Abständen mit Tomatenpflanzen bestückt ist Der Roboter, der mit einem Bildverarbeitungssystem und einem teleskopischen Schneidwerkzeug ausgestattet ist, fährt systematisch von Pflanze zu Pflanze, erkennt die Blätter und entfernt sie.
Herausforderungen in der Gestaltung
Bei der Entwicklung des Systems kam es den Ingenieuren von Priva darauf an, sicherstellen zu können, dass das bildverarbeitungsbasierte Robotersystem bei Tag und Nacht in der herausfordernden Arbeitsumgebung gewerblicher Gewächshäuser ohne Unterbrechung funktionierte. Das System musste also in der Lage sein, die kleinen grünen Blattstiele – bzw. die Stängel, die die Tomatenblätter mit den Stielen verbinden – aus einer Vielzahl anderer grüner Blätter zu erkennen und bei verschiedenen Lichtverhältnissen – von hellem Sonnenlicht über künstliche Beleuchtung bis hin zu völliger Dunkelheit während der Nacht – zu arbeiten.
Um diese Aufgabe zu lösen, beschlossen die Entwickler, das Bildverarbeitungssystem um ein Paar stereoskopischer Kameras, die zusammen mit einem teleskopischen Schneidarm auf einer beweglichen Plattform befestigt sind, zu bauen. Die stereoskopischen Kameras – beide speziell angefertigt aus zwei Paar Chameleon3 -Kameras mit OnSemi Python-Sensoren mit einer Auflösung von 1280 x 1024 – nehmen ein weites Sichtfeld von der linken und rechten Seite jeder Tomatenpflanze auf. (Abbildung 2).
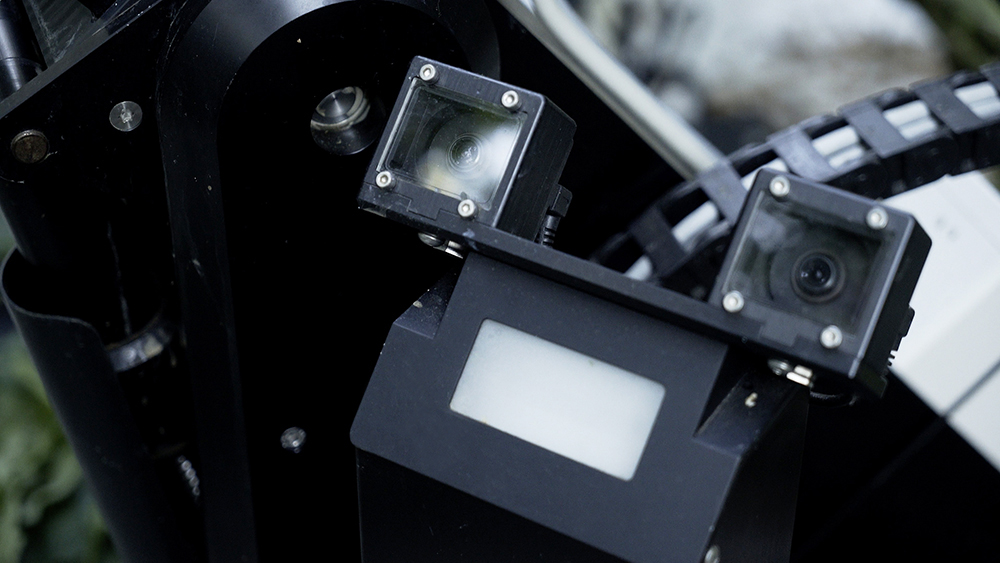
Abbildung 2: Das Bildverarbeitungssystem des Roboters verfügt über ein Paar stereoskopischer Kameras, die, zusammen mit dem teleskopischen Schneidarm, auf einer beweglichen Plattform befestigt sind. Die stereoskopischen Kameras – beide speziell angefertigt aus zwei Paar Chameleon3 -Kameras mit OnSemi Python-Sensoren mit einer Auflösung von 1280 x 1024 – nehmen ein weites Sichtfeld von der linken und rechten Seite jeder Tomatenpflanze auf.
"Um es jedem Paar stereoskopischer Kameras zu ermöglichen, zuverlässige Bilder der Tomatenpflanzen unabhängig von den Lichtbedingungen im Treibhaus aufzunehmen, setzt das System auf ein Xenon-Blitzlicht, das die Pflanze beleuchtet. Während der Blitz-Controller alle zwei Sekunden Lichtblitze abgibt, triggert er die stereoskopischen Kameras, in 30-Mikrosekunden-Intervallen Bilder zu belichten. So ist es dem System möglich, jedes Mal ein homogenes Bildpaar aufzunehmen“, erklärte Dr. de Boer.
Sobald die beiden stereoskopischen Kameras ein Bildpaar aufgenommen haben, wird dieses über eine USB-Schnittstelle an einen PC übertragen, auf dem das Open-Source-Betriebssystem Ubuntu und das Robot Operating System (ROS) ausgeführt werden. Dabei handelt es sich um ein Open-Source-Softwaresystem der Open Source Robotics Foundation Inc. (OSRF), mit dem auf mehreren verschiedenen Plattformen Roboteranwendungen erstellt werden.
System-Software
Danach kommen maßgeschneiderte Bildverarbeitungsfunktionen in OpenCV zum Einsatz, um die Bilder beider Kamerapaare zu verarbeiten und die Position der Blätter an den Tomatenpflanzen in einem zuvor vom Tomatenzüchter definierten Höhenbereich zu erkennen. Nach der Erkennung der Blattpositionen berechnet die Bildverarbeitungssoftware die exakten dreidimensionalen Koordinaten der Blattstiele, die von dem Effektor am Ende des Roboterarms abgeschnitten werden müssen.
Die von der Bildverarbeitungssoftware generierten Koordinaten werden an das Robot Operating System (ROS) übertragen, das die Daten an zwei intelligente Servoantriebe übermittelt, die jene Motoren antreiben, welche den teleskopischen Roboterarm zur richtigen Position an der Pflanze führen. Dort angekommen, schneidet der Endeffektor die Blattstiele ab und entfernt die Blätter von der Tomatenpflanze (Abbildung 3).
Da die stereoskopischen Kameras auf derselben Plattform angebracht sind wie der Roboterarm, werden sie, sobald der Arm sich bewegt, um einen bestimmten Blattstiel abzuschneiden, ebenfalls an eine neue Position gebracht, wo sie aus einer anderen Perspektive ein weiteres Paar Bilder von der Pflanze aufnehmen.
„Diese neuen Bilder werden parallel zum Schneidevorgang verarbeitet, damit gegebenenfalls weitere Blätter lokalisiert werden, die danach zu entfernen sind. Dieses Verfahren wird so oft wiederholt, bis das System keine weiteren Blätter mehr findet, die von der Pflanze entfernt werden müssten. Nach einer abschließenden Kontrolle endet der Schneidevorgang und der Roboter fährt die Schienen entlang zur nächsten Pflanze im Gewächshaus“, sagte Dr. de Boer.

Abbildung 3: Nachdem die Position der Blattstiele an der Tomatenpflanze von der Bildverarbeitungssoftware ermittelt worden ist, werden die Daten verarbeitet, damit der teleskopische Roboterarm an dem Roboter zur richtigen Stelle gebracht werden kann. Dort angekommen, schneidet der Endeffektor die Blattstiele ab und entfernt die Blätter.
Feinschliff
Gegenwärtig arbeiten die Entwickler des Deleaf-Line-Roboters Kompano zusammen mit Mitgliedern der Tomatenanbau-Unternehmensgruppe in den Niederlanden an der Fertigstellung eines Vorab-Prototypen des Systems.
Jene Mitglieder, die mit Priva zusammengearbeitet haben, werden als erste die Gelegenheit haben, das System zu nutzen, sobald es Anfang nächsten Jahres auf den Markt kommt. Je nachdem, wie viele Roboter die Tomatenanbau-Unternehmensgruppe bestellt, kommt er dann ab Juni 2017 auch für andere Tomatenzüchter in den Handel. Seit Juni diesen Jahres ist es auch möglich, den Roboter online vorzubestellen.
Man geht davon aus, dass der Entblätterungsroboter in der Lage sein wird, je nach Blattdichte 0,75 bis 1 Hektar Tomatenpflanzen zu pflegen. In größeren Anlagen haben Züchter die Wahl, entweder mehrere Roboter einzusetzen oder das automatisierte System mit manueller Arbeit zu kombinieren.
Laut Dr. de Boer wird der Tomatenentblätterungsroboter nur der erste von vielen Robotern sein, die das Unternehmen für den Gartenbaumarkt noch entwickeln will. Diese neue Generation von Systemen wird andere arbeitsintensive Aufgaben, wie etwa das Ernten von Gemüsesorten (z. B. Gurken), automatisieren.
Über die Priva Group
Priva schafft ein Klima des Wachstums. Das Unternehmen ist Vorreiter in der Entwicklung und Herstellung von Technologien zur Optimierung der Umweltbedingungen sowie im Bereich des Prozessmanagements. Mit einer einzigartigen Kombination aus Software, Hardware und Serviceleistungen bietet Priva Lösungen für Gartenbau, Gebäudeautomation und alles dazwischen.
www.privagroup.com