Robot guiado por visión poda unas plantas de tomate con Chameleon3
Quitar las hojas de las plantas de tomate es un procedimiento relativamente simple que tradicionalmente ha implicado cortar manualmente las hojas más viejas de la parte inferior de los tallos. El proceso se realiza semanalmente en cultivos de tomate con fines comerciales para promover la maduración de los tomates. Sin embargo, la imprevisibilidad y el alto costo del trabajo manual involucrado en el proceso y la búsqueda de una fuerza de trabajo motivada para esta tarea monótona recientemente llevaron a un consorcio de productores comerciales de tomate en los Países Bajos a unir fuerzas con los especialistas en automatización de Priva para crear una solución alternativa. La culminación de sus esfuerzos ha resultado en el desarrollo y la optimización de un robot que ofrece a los productores de tomates una alternativa económicamente viable para el deshoje manual de los cultivos de tomate cultivados en invernaderos.
Según el Dr. Tomas de Boer, ingeniero de diseño mecatrónico del equipo de desarrollo de Priva responsable del diseño del sistema, el robot Kompano Deleaf-Line viaja por carriles tubulares existentes en el invernadero, que está poblado de plantas de tomate espaciadas a intervalos a ambos lados de las vías (Figura 1). El robot, que está equipado con un sistema de visión y un cortador telescópico, se mueve de una planta a otra de forma secuencial, identificando y luego retirando las hojas de cada una.

Figura 1: el robot Kompano Deleaf-line viaja por carriles tubulares en el invernadero, que está poblado con plantas de tomate espaciadas a intervalos a ambos lados de las vías. The robot, which is fitted with a vision system and a telescopic cutter moves from plant to plant in a sequential fashion, identifying and then removing the leaves from each one.
Desafíos de diseño
En el desarrollo del sistema, los ingenieros de Priva necesitaban asegurarse de que el sistema robótico basado en la visión pudiera funcionar continuamente durante el día y la noche en las difíciles condiciones ambientales que se encuentran en los invernaderos comerciales. Por lo tanto, el sistema debía ser capaz de identificar pequeños pecíolos de las hojas verdes -o los turiones que unen las hojas de tomate a sus tallos- en un mar de otras hojas verdes y operar bajo una variedad de condiciones de iluminación, desde luz solar brillante o luz artificial a la completa ausencia de luz durante la noche.
Para resolver estos desafíos, los desarrolladores decidieron construir el sistema de visión alrededor de un par de cámaras estereoscópicas montadas en una plataforma móvil, junto con un brazo de corte telescópico. Las cámaras estereoscópicas, que fueron creadas de forma personalizada a partir de dos pares de cámaras Chameleon3 con sensores OnSemi Python con resolución de 1280 x 1024, capturan un amplio campo de visión desde el lado izquierdo y derecho de cada planta de tomate. (Figura 2).
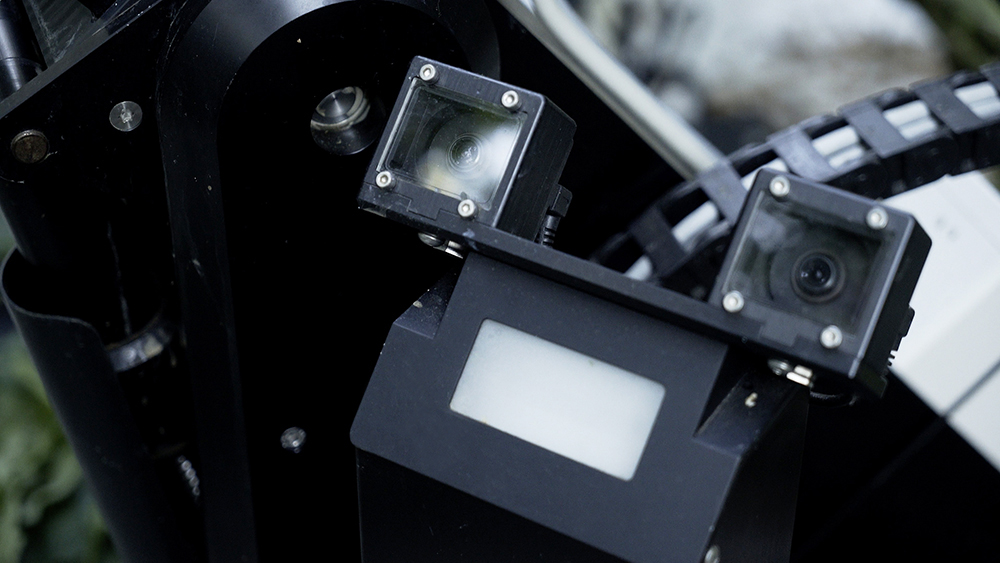
Figura 2: el sistema de visión para el robot usa un par de cámaras estereoscópicas montadas en una plataforma móvil junto con el brazo de corte telescópico. Las cámaras estereoscópicas, que fueron creadas de forma personalizada a partir de dos pares de cámaras Chameleon 3con sensores OnSemi Python con resolución de 1280 x 1024, capturan un amplio campo de visión desde el lado izquierdo y derecho de cada planta de tomate.
"Para permitir a cada par de cámaras estereoscópicas a capturar imágenes confiables de las plantas de tomate, independientemente de las condiciones de iluminación en el invernadero, el sistema emplea una luz estroboscópica de Xenon que ilumina la planta. A medida que la luz estroboscópica emite luz cada dos segundos, activa las cámaras estéreo para exponer las imágenes a intervalos de 30 microsegundos. Esto permite que el sistema capture un conjunto uniforme de imágenes cada vez", dijo el Dr. de Boer.
Una vez que las dos cámaras estéreo capturan un par de imágenes, se transfirieren a través de una interfaz USB a una PC con sistema operativo Ubuntu de código abierto y un Sistema Operativo de Robot (ROS), un marco de software de código abierto alojado por Open Source Robotics. Foundation, Inc. (OSRF) para crear aplicaciones robóticas en una variedad de plataformas.
Software del sistema
Las funciones de procesamiento de imágenes a medida dentro de OpenCV se utilizan para procesar las imágenes de ambos conjuntos de cámaras para identificar la ubicación de las hojas en las plantas de tomate en un cierto rango de altura previamente definido por los productores de tomate. Después de haber identificado la ubicación de las hojas, el software de procesamiento de imágenes calcula las coordenadas tridimensionales exactas de los pecíolos, los cuales deben ser cortados por el efector en el extremo del brazo robótico.
Los datos de coordenadas generados por el software de procesamiento de imágenes se pasan al Sistema Operativo de Robot (ROS), que transfiere los datos a un conjunto de servoaccionamientos inteligentes que alimentan los motores que conducen el brazo robótico telescópico a la ubicación correcta en la planta. Una vez que llega a su destino, el efector del extremo corta los pecíolos y retira las hojas de la planta de tomate. (Figura 3).
Debido a que las dos cámaras estéreo están montadas en la misma plataforma que el brazo robótico, una vez que el brazo se mueve para cortar un conjunto específico de pecíolos, las cámaras también se mueven a una nueva ubicación, donde capturan un conjunto adicional de imágenes de la planta desde una perspectiva diferente.
"Estas nuevas imágenes se procesan en paralelo durante la operación de corte para identificar cualquier otra hoja que deba eliminarse de la planta en cualquier operación posterior. El procedimiento iterativo continúa hasta que el sistema no puede detectar la necesidad de eliminar más hojas de la planta. Después de realizar un control final, la operación de corte cesa y el robot se mueve a lo largo de las vías hasta la siguiente planta en el invernadero", dijo el Dr. de Boer.

Figura 3: Una vez que la ubicación de los pecíolos en la planta de tomate ha sido determinada por el software de procesamiento de imágenes, los datos se utilizan para conducir el brazo robótico telescópico del robot a la ubicación correcta. Una vez que llega a su destino, el efector del extremo corta los pecíolos y retira las hojas de la planta de tomate.
Toques finales
En la actualidad, los desarrolladores del robot Kompano Deleaf-Line están trabajando con miembros del consorcio de productores de tomate en los Países Bajos para finalizar un prototipo de preproducción del sistema.
Aquellos miembros que trabajaron con Priva serán los primeros en aprovechar el sistema cuando finalmente esté disponible a principios del próximo año. Dependiendo de la cantidad de robots que ordene el consorcio, estará luego disponible para otros productores de tomates a partir de junio de 2017. A partir de junio de este año, también es posible preordenar el robot en línea.
Una vez en uso, se espera que el robot de deshoje sea capaz de hacer el mantenimiento de 0,75 a 1 hectárea de plantas de tomate, dependiendo de la densidad de las hojas en sus tallos. En instalaciones más grandes, los productores pueden elegir trabajar con múltiples robots o combinar el sistema automatizado con el trabajo manual.
Según el Dr. de Boer, el robot de deshoje será el primero de muchos robots que la compañía planea desarrollar para el mercado hortícola. Estos sistemas de próxima generación automatizarán otras tareas de mano de obra intensivas, como es la cosecha de vegetales, en este caso como los pepinos.
Acerca de Priva Group
Priva crea un clima para el crecimiento. La compañía lidera el camino en el desarrollo y la producción de tecnología para la optimización de las condiciones ambientales y la gestión de procesos. Priva ofrece soluciones para la horticultura, la automatización de edificios y cualquier otra solución intermedia con una combinación única de software, hardware y servicios.
www.privagroup.com