기술 혁신
1997년 이래 스테레오 비전의 선구자
FLIR는 1997년부터 산업을 선도하는 2D 및 3D 스테레오 비전 센서를 개발하고 제조해 왔습니다. 저희가 세계 최초 대량 판매 스테레오 비전 센서를 런칭한 이후에도 셀 수 없이 많은 혁신이 계속되어 왔습니다. 정확도, 이미지 품질, 교정, 크기, 그리고 신뢰도의 개선은 지속적인 하드웨어 및 소프트웨어 개발이 낳은 산물입니다. 저희의 풍부한 경험과 품질에 대한 헌신은 산업을 선도하는 기술을 일반적 수명을 훨씬 넘어서는 시간 동안 지속되는 제품과 통합할 수 있게 합니다. 그에 따라 1세대 사람 추적 및 계산 센서가 여전히 사용되며 작동하고 있습니다.

1997년(왼쪽)부터 2017(오른쪽)까지 FLIR 스테레오 비전 기술의 진화
기술적인 이야기를 해 봅시다
FLIR는 이미지 수정 및 정렬에서 밀집된 상관 관계 기반 스테레오 매핑에 이르기까지 완전한 스테레오 처리 지원을 포함하는 혁신적인 하드웨어 및 소프트웨어 패키지를 개발함으로써 3D 스테레오 비전을 가장 정확하고 일관성 있는 고객 수 측정 기술로 만들어냈습니다.
어떻게 작동하나요?
3D 스테레오 비전은 인간 시각의 3D 센서 탐지와 비슷한 방식으로 작동합니다. 이는 먼저 여러 카메라가 관찰하는 장면에서 똑같은 포인트에 상응하는 이미지 픽셀을 식별하는 것으로 시작합니다. 한 포인트의 3D 포지션은 각 카메라의 광선을 사용한 삼각 측정을 통해 구축될 수 있습니다. 더 많은 상응 픽셀이 식별될수록 한 세트의 이미지에서 판단할 수 있는 3D 포인트가 더 많아집니다. 상관 관계 스테레오 방식은 스테레오 이미지 내 각 픽셀 모두에 대한 상응하는 픽셀을 획득하고자 하며, 이는 각 스테레오 이미지마다 수만 개의 3D 값을 생성하게 됩니다.

각 센서에는 2개의 카메라가 장착되어 있습니다.
이는 센서가 3D 깊이를 측정할 수 있게 합니다.
3D 스테레오 이미징 파이프라인
정확도를 유지하는 방법: 측정 및 수정
각 FLIR Brickstream 센서 모두 모든 센서에 걸쳐 교정의 일관성을 보장할 수 있도록 렌즈 왜곡 및 센서 오정렬을 위한 공장 교정을 마쳤습니다. 수정 과정에서 등극선 라인은 0.05* 픽셀 RMS 오류 내로 정렬됩니다. 측정 및 교정은 3D 센서에서 고품질 변이 영상을 획득하는 주요 핵심이며, 센서 간에 일관성 있고 정확한 고객 수 측정 데이터 획득을 가능하게 합니다. 센서 디자인은 또한 특별히 측정치를 기계적 쇼크와 진동으로부터 보호하기 위해 고안되었습니다. 아래는 3D 스테레오 높이 이미지를 측정하기 위한 FLIR Brickstream 3D 센서의 기술 작업 흐름입니다.

1) RAW 이미지
Raw 이미지는 센서 내 왼쪽, 그리고 오른쪽 카메라로 포착됩니다. 가벼운 렌즈 왜곡이 이미지 배럴링을 형성합니다.

2) 수정된 이미지
이 한 쌍의 이미지는 렌즈 왜곡을 없애고 서로에게 수평으로 정렬되도록 수정되었습니다. 이 이미지는 이제 똑바른 투시선을 유지하고 있습니다.

3) 엣지 이미지
그 다음 엣지(가장자리) 강조를 적용하여 이미지 밝기에 따라 왜곡되지 않는 엣지 이미지를 생성합니다.
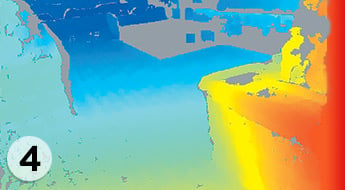
4) 3D 깊이 이미지
오른쪽 이미지의 각 픽셀에 맞는 왼쪽 이미지의 픽셀을 상관 관계에 따라 획득합니다. (깊이를 보여주기 위해 채색함)