技术创新
自 1997 年以来的立体视觉技术先锋
自 1997 年以来,我们一直在开发和制造行业前列的 2D 和 3D 立体视觉传感器。 自从我们推出世界上第一款大众市场立体视觉传感器以来,已进行无数创新。 持续软硬件开发活动推动了精确度、图像质量、校准、尺寸和可靠性方面的改进。 丰富的经验以及对质量的承诺使我们能够将技术整合到具有超长生命周期的产品中。许多第一代追踪和统计传感器如今仍在使用和运行中!

我们从 1997 年(左)至 2017 年(右)的立体视觉技术发展历程
从技术上分析
通过开发创新的硬件和软件包,FLIR 使 3D 立体视觉成为准确稳定的客流量统计技术,其中包括完整的立体处理支持(从图像更正和校正到基于密集相关的立体映射)。
它的工作原理是什么?
3D 立体视觉技术与人类视觉中的 3D 感觉类似。 首先,识别与多个摄像头观察到的场景中的相同点相对应的图像像素。 然后,可以使用来自每个摄像头的射线的三角测量来建立点的 3D 位置。 识别的对应像素越多,可通过单组图像确定的 3D 点越多。 相关立体方法尝试获取立体图像中每个像素的对应关系,从而对每个立体图像生成成千上万个 3D 值。

每个 3D 传感器配备 2 个摄像头。
这允许传感器计算 3D 深度。
3D 立体成像管道
我们如何保持准确性:校准和校正
在工厂中已针对镜头失真和传感器失准为每个 FLIR Brickstream 传感器执行校准,确保所有传感器的校准的一致性。 在校正过程中,对极线在 0.05* 像素 RMS 误差范围内对准。 校准和校正是从 3D 传感器获取高质量差异图像的关键,并支持在传感器之间进行一致而准确的数据采集。 传感器还经过专门设计,可使校准过程免受机械冲击和振动影响。 以下是用于计算 3D 立体高度图像的 FLIR Brickstream 3D 传感器的技术工作流。

1) 原始图像
从传感器上的左右侧摄像头捕获原始图像。 轻微的镜头失真造成图像滚动。

2) 经校正的图像
校正一对图像以去除透镜失真,并使它们彼此水平对准。 图像现在具有直线透视线。

3) 边缘图像
然后,应用边缘增强功能创建不因图像亮度而偏置的边缘图像。
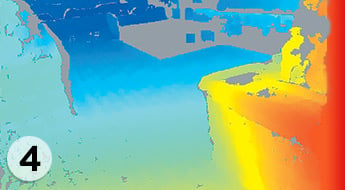
4) 3D 深度图像
对于右图中的每个像素,通过相关来获得左图像中的相应像素。 (进行着色以显示深度)