视觉引导机器人用 Chameleon3 相机修剪番茄叶
清除番茄植株叶子是个相对简单的程序,传统上一直是人工从植株茎部下段剪除较老的叶子。 对于商业种植的番茄作物,这个过程每周一次,以促进番茄的成熟。 然而,最近这个过程所涉及体力劳动、及为这项单调任务找到积极的劳动力的不可预测性和高成本,导致荷兰的商业番茄种植商财团与Priva的自动化专家联手,以创建替代方案。 他们经过长期努力,已经开发和优化了一种机器人,为番茄种植商人工为温室种植的番茄作物除叶提供经济上可行的替代方案。
Tomas de Boer博士是 Priva 负责该系统设计的开发团队内的电子机械设计工程师,据其表示,Kompano Deleaf-Line 机器人沿温室内各垄的现有管型轨道前进,其中轨道的两侧按照一定间距布满番茄植株 (图 1)。 机器人装备有视像系统和伸缩式切割臂,连续地从一棵植株移向下一棵植株,确定然后再清除每棵植株的叶子。

图 1:Kompano Deleaf-Line 机器人在温室中沿着管型轨道移动,温室中种满的番茄植株,以均匀间隔分布在轨道的两侧。 The robot, which is fitted with a vision system and a telescopic cutter moves from plant to plant in a sequential fashion, identifying and then removing the leaves from each one.
设计上的挑战
在系统的开发中,Priva 的工程师们需要确保基于视像的机器人系统,在商业温室中出现的挑战性环境条件下,在白天和晚上都能持续运行。 因此该系统需要能够识别小叶的叶柄 - 或将番茄叶片连接到其茎部的叶梗 - 在其他绿叶的海洋中,并且在各种光照条件下工作,从明亮的阳光或人工光到晚间的完全无光。
为了解决这些挑战,研发人员选择人员选择围绕一对立体感摄影机的视像系统,后者与伸缩式截割臂一起安装在可移动平台上。 立体感摄影机 - 均为定制而成,各包括两对具有 OnSemi 1280 x 1024 分辨率 Python 传感器的 Chameleon3 相机 - 从番茄植株的左侧和右侧捕捉宽泛的视野。 (图 2)。
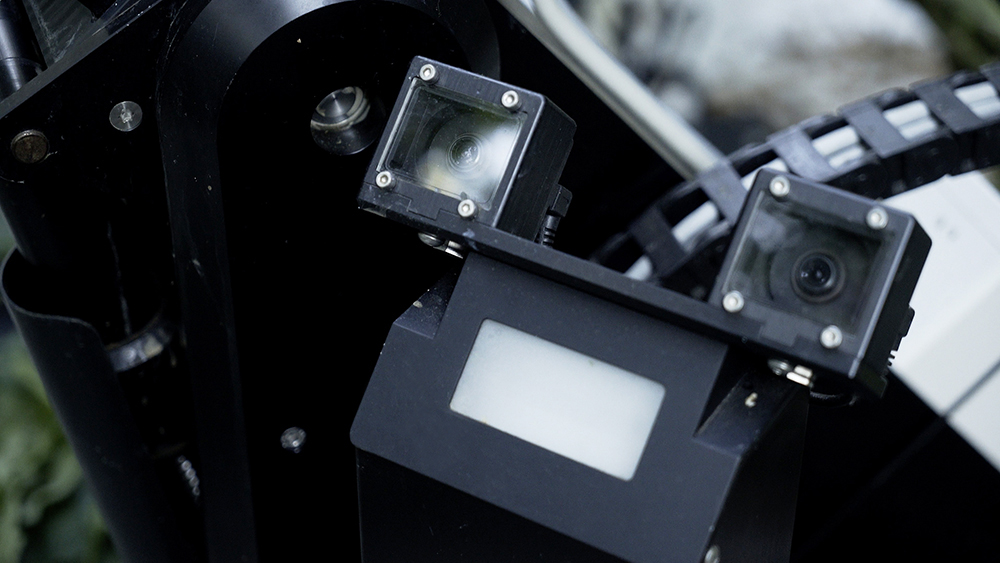
图 2:机器人的视像系统使用与伸缩式截割臂一起安装在可移动平台上的一对立体感摄影机。 立体摄像机 - 这些定制的构成包括两对具有 OnSemi 1280 x 1024 分辨率 Python 传感器的 Chameleon 3 相机 - 捕捉每个番茄植株左右手册的广阔视野。
"为了能够使每一对立体摄像机捕捉番茄植株的可靠图像,不论温室的光照条件,该系统采用 Xenon 频闪灯光,给植株照明。 随着闪光灯每两秒发光一次,闪光灯触发立体摄影机,以按照30微秒的间隔曝光图像。 这样每次都能采集一组均一的图像“,de Boer 博士说。
一旦这两个立体摄像机已经采集到一对图像,就经过 USB 接口传递给运行开源 Ubuntu 操作系统和机器人操作系统 (ROS) 的电脑;ROS 为一种开源软件框架,由 Open Source Robotics Foundation, Inc. (OSRF) 托管,以便在各种平台创建机器人应用程序。
系统软件
在 OpenCV 内,Bespoke 图像处理功能用于处理来自两组相机的图像,以按照番茄种植商事先定义的一定高度范围确定番茄植株叶子的位置。 一经确定了叶子的位置,然后图像处理软件计算其叶柄的确切三位坐标,这需要机械臂末端的效应器来切割。
图像处理软件生成的坐标数据传递给机器人操作系统 (ROS),这样讲数据传送给一组智能伺服驱动系统,给电机通电,再将伸缩机械臂推动至植株上的正确位置。 一旦到达其目的地,然后末端效应器切断叶柄,清除番茄植株的叶子(图 3)。
因为这对立体感摄影机安装在与机械臂相同的平台上,一旦机械臂移动切掉一组特定的叶柄,摄像头同样移动到一个新位置,在那里它们再从不同的角度捕获下一组植物叶子。
"切割操作期间,平行处理这些新的图像,以确定该植株t在任何后续操作中是否需要清除任何其它叶子。 迭代法继续,直至系统不能检测该植株是否需要清除任何其它叶子。 在温室中,在执行了最终检查之后,切割操作停止,而机器人沿着轨道移动到下一棵植株上",de Boer博士说道。

图 3:一旦西红柿植株上叶柄的位置被图像处理软件确定,该数据被用于将机器人的伸缩机械臂推动到正确位置。 一旦到达其目的地,然后末端效应器切断叶柄,清除叶子。
收尾工作
目前,Kompano Deleaf-Line 机器人的开发人员正在与荷兰番茄种植财团的会员,以敲定该系统的试生产样机。
下一年开始伊始,当该系统最终可供使用之时,那些与 Priva 合作的会员将会首先利用该系统。 取决于财团所预订的机器人的数量,那么从2017年6月起,将会可供其它番茄种植商使用。 截至本年六月,还可以在线预订机器人。
在使用中,除叶机器人被期望能够维护 0.75 到 1 公顷的番茄作物,取决于那些茎上的叶子密度。 在较大的设施中,种植商可以选择采用多台机器人工作也可以选择组合自动化系统与体力劳动。
据 de Boer 博士认为,番茄除叶机器人将会是本公司计划为园艺学市场研发的诸多机器人的第一款机器人。 这些下一代系统将会自动化其它劳动密集型任务,例如收割诸如黄瓜之类的蔬菜。
关于 Priva Group
Priva 创建生长气候。 该公司促进技术的开发和生产,实现环境条件和过程管理的优化。 Priva 借助独特的软件、硬件和服务组合,提供园艺学解决方案,构建自动化及其间的任何东西。
www.privagroup.com