借助多个预校正相机的准确 360° 球型成像
今天,球型视频数据的质量和灵活性使该媒介成为需要同步视频流的应用的理想之选。典型的是成为 GIS 应用,例如移动地图和街景,彩色化 LIDAR 生成的 3D 点云。
Teledyne FLIR Ladybug 球型成像系统已成为实质上的行业标准。Ladybug 系统都具有图像采集、处理、拼接和校正功能,可将多个摄像头图像实时合并到全分辨率的数码球型和全景流式视频之中。这种实时媒体流的能力在市场上是独特的。
多个摄像头同步化
|
在一些系统使用镜子或鱼眼镜头产生全景效果的情况下,Ladybug 系统使用六个具有高质量图像传感器的摄像头,以从代表整个球型 90% 的六个优越位置收集并真正提供图像。五个传感器位于水平环上,而一个的位置则是垂直指向上方。这六个摄像头都经过预先校正;这就是关键技术,使得在系统之内的很多其它创新成为可能。由于镜头设置,例如焦点与虹膜,均为固定以确保相机保持校正状态,使其不需要现场校正。 Ladybug 相机受控于作为 SDK 的一部分的 Ladybug API。这样能够完全控制相机、图形呈现以及坐标系统概述。图像呈现支持包括实时校正、拼接和混合。系统坐标允许用户单独管理这六个传感器中的任一个。最后,SDK 允许用户整合系统与其定制应用。 |
|


几何校准与精确性
Ladybug 系统并非仅依靠机械校准,它还可通过软件对各个摄像头进行单独校准,然后再与另外五个摄像头进行一一比对校准。该系统能够识别与每个摄像头的每个像素有关的矢量,精确度高达百分之一度。这反过来能使应用知道,相对于剩余的世界,相机在哪里。为了能够提供这种相关数据,Teledyne FLIR 不仅解决了校正镜头的问题,而且还解决了校正在所有六个镜头之间旋转和转化至高精度的更大挑战——一个因摄像头视场之间的小重叠而更困难的问题。

Ladybug 校准的几何精确度意味着图像数据在整个球型上的空间一致性,而不仅仅是在整个拼接缝内。这允许 Teledyne FLIR 软件呈现任何视频球体的局部视图,即使那样呈现跨越多个相机图像,也没有瞩目的镜头失真。
使用软件校正而不是准确机械调准的决定,意味着 Ladybug 相机能够按照有效且合理的机械耐受性要求进行组装。Teledyne FLIR 已经自动化了工厂校正流程,从而产生极其一致且可靠的结果。机械设计和自动化校准已经使 Ladybug 相机生产非常稳定,而且可以适应不断变化的需求。另外,工厂校正和牢固的外壳设计消除任何现场校正的需求。Ladybugs 经原厂校正一次,然后再封装入经加固的独特刚性外壳,其牢固程度足以抵御温度、振动和电击的变化。因此,校正保持完整,而且不再有需要作出现场校正。

校准的益处
使得应用程序知道相机与世界相对位置的能力,使 Ladybug 超越相机拍摄全景图像,并进入计算机视觉的王国,从而打开一系列可能的应用程序。
最大动态范围的后处理工作流程
凭借 Ladybug5+,图像处理从相机转移到用户控制结果的主机上。Ladybug5+ 捕获、压缩以及传送全色深度(12 位)图像到主机。LadybugCapPro 的后处理工具栏用于运用白平衡、灰度系数、拖尾校正、衰减校正和其它图像处理功能。用户可以在查看图像时选择并尝试各种设置,并且可以观看实时效果。
后处理的益处
捕获和后处理工作流程模型可使用户能够返回到原始内容,并根据需要重新应用各个后期处理步骤从而把动态范围最大化,并保持其灵活性。
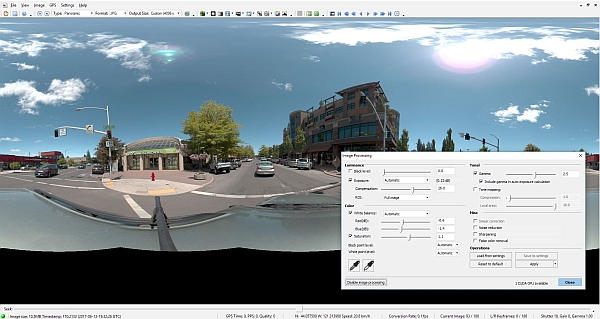
鼠标滑过图像以查看经过后处理的校正图像。 彩色经过 校正,阴影细节 被带出来,而太阳拖尾已消除。
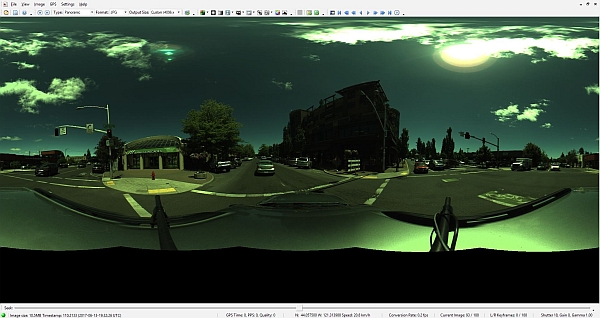
鼠标滑过图像以查看经过后处理的校正图像。 彩色经过 校正,阴影细节 被带出来,而太阳拖尾已消除。